



Simulateur de poignet arthroscopique VR pour les chirurgiens
VOKA a développé un simulateur VR très réaliste pour l'arthroscopie du poignet, avec des modèles 3D anatomiquement précis et des modules d'apprentissage progressifs.
Les patients souffrant de troubles articulaires, en particulier ceux qui affectent le poignet, sont de plus en plus demandeurs de chirurgies peu invasives, y compris l'arthroscopie. Toutefois, ces procédures nécessitent un niveau élevé de compétences de la part du praticien en raison de la complexité de l'articulation et de la diversité des maladies qui y sont liées. Une chirurgie inappropriée peut augmenter l'incidence des complications et atténuer l'effet curatif. Ces procédures constituent une courbe d'apprentissage abrupte pour les étudiants en orthopédie. Les spécificités de l'arthroscopie impliquent des techniques chirurgicales qui exigent des chirurgiens qu'ils visualisent mentalement un environnement tridimensionnel à partir d'images bidimensionnelles et qu'ils effectuent l'opération grâce à une coordination main-œil spécifique avec peu de retour tactile.
Compte tenu de ces difficultés, le client* de VOKA - un établissement d'enseignement de premier plan dans le domaine des soins de santé - s'est fixé comme priorité d'améliorer la formation à l'anatomie des articulations. Il n'existait que peu ou pas de simulateurs adaptés aux procédures orthopédiques en général et à l'arthroscopie du poignet en particulier. Conscient du champ de vision limité et de l'interaction réduite entre le médecin et le patient, le client est arrivé à la conclusion que la formation à la RV était la solution la plus viable. Il s'est donc tourné vers VOKA pour l'aider à créer le simulateur.
DÉVELOPPEMENT COLLABORATIF

Afin de respecter des normes médicales élevées et de garantir la précision, nous avons impliqué des chirurgiens orthopédiques dans le processus de développement. Leur contribution a déterminé la conception, les caractéristiques et les modules de formation, créant ainsi une expérience d'apprentissage authentique tout en soulignant les défis techniques et psychomoteurs critiques auxquels les praticiens sont confrontés.
CARACTÉRISTIQUES PRINCIPALES
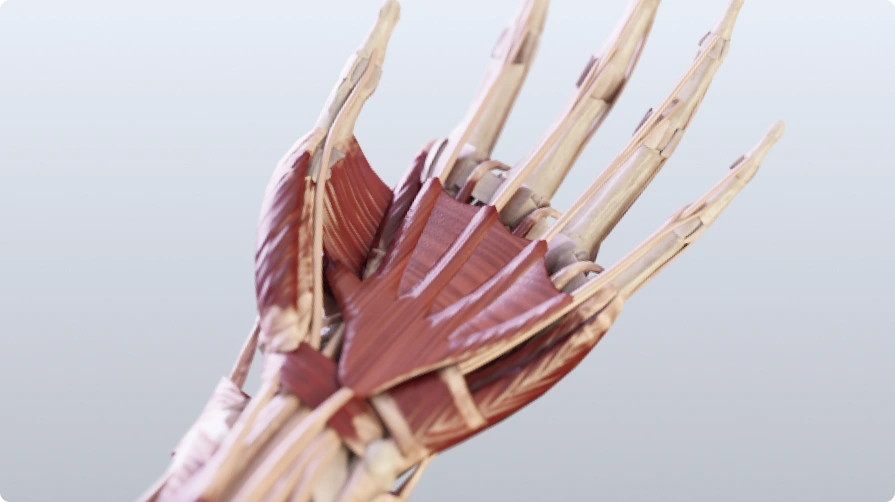
Anatomie de haute précision :
Le simulateur présente des modèles 3D anatomiques précis des articulations basés sur Unity, mettant en évidence les détails des os, des ligaments, des tendons, des nerfs et des vaisseaux sanguins. Cette visualisation multicouche permet aux stagiaires de comprendre les relations spatiales au sein des articulations.
Simulation chirurgicale réaliste :
Le simulateur plonge les stagiaires dans un environnement de salle d'opération virtuelle qui permet un positionnement et une manipulation réalistes du patient. Ils peuvent s'exercer à toute une série d'interventions orthopédiques, y compris l'arthroscopie du poignet.
Les principales étapes de l'arthroscopie sont les suivantes :
- Placement du portail :
Identifier et établir avec précision les portails arthroscopiques à l'aide d'aiguilles et de canules virtuelles, en recevant un retour haptique qui simule la résistance des tissus. - Instrument de navigation :
Manœuvrer des instruments arthroscopiques, tels que des sondes, des rasoirs, des pinces, dans l'espace articulaire, en développant la coordination main-œil et la conscience spatiale, qui sont extrêmement difficiles à développer autrement. - Reconnaissance et gestion des pathologies :
Le simulateur présente diverses pathologies du poignet (par exemple, déchirures du complexe fibrocartilagineux triangulaire (TFCC), lésions du ligament scapho-lunaire, syndrome du canal carpien) permettant aux stagiaires de diagnostiquer et d'appliquer sans risque les techniques chirurgicales appropriées.
Modules d'apprentissage progressifs :
Les modules de formation commencent par l'identification de l'anatomie de base et progressent vers des cas chirurgicaux plus complexes. Cette approche graduelle permet de renforcer la confiance en soi, ce qui s'avère très utile dans la salle d'opération.
Retour d'information et évaluation des performances :
Le simulateur fournit un retour d'information en temps réel sur les performances de l'utilisateur, la manipulation des instruments et la prise de décision en cours de route. Les données objectives permettent aux stagiaires de suivre leurs progrès et d'identifier les domaines à améliorer. En outre, le simulateur a permis de développer des modules de formation dont la complexité augmente progressivement.
Modélisation 3D et intégration de Unity :
Pour planifier des incisions chirurgicales qui simulent l'interaction physique des tissus et reproduisent la caméra d'un laparoscope, l'équipe de VOKA a utilisé des modèles 3D Unity multicouches du poignet. Ces modèles ont été créés à l'aide d'images médicales haute résolution qui ont permis de créer des présentations détaillées des os, des articulations, des ligaments, etc. du poignet. Avec le moteur 3D, nous avons assuré un rendu de modèle de haute précision et une intégration physique réelle qui simule la résistance des tissus et l'interaction avec l'instrument.
*Les informations détaillées concernant le client ne peuvent pas être divulguées en vertu des dispositions de l'accord de confidentialité.